Sorawit Stapornchaisit
Email: sorawit2000y2k@gmail.com
Profile
A self-motivated engineer researcher with strong skill in communication, programming, and electrical hardware development. Professional in electronic engineer for signal processing and communication between device using serial, wireless, and/or network protocol. My skill particularly in area of data and robotic engineer with python-based programming in Windows, Mac, and Linux operating system. Experienced in adapt AI and machine learning using scikit-learn to estimate real-world data for decision in robot. Excellent international and interdisciplinary team work ability with good understanding for state-of-the-art technologies in the field of computer engineering.
My interest is
- Create model that used synthetic training data to detect object in real-world.
- Develop a deep learning algorithm that optimized to run on embedded system.
EMG based softhand control system
- Create robot that reduce human labor.
Language
- English – Professional
- Japanese – JLPT N1 (2018)
Programming skills
Focus on robotic related programming language and deep learning system.
Programming Language
-
C, C++, C#: OpenGL, MATLAB, Python
- Python: Experienced with TensorFlow, torch, Django, pygame, streamlit, flask
- MATLAB: EEGLAB, Simulink,
Hardware related
- VHDL, android for raspberry pi, CT scan, MRI operator
Website frontend
- HTML with bootstrap, nodejs
Database
- PostgreSQL, SQLite, JSON
Simulation program
- Blender, Unity, Meshmixer
Experience
EAGLYS株式会社
October 2021 - Present: AI Engineer, Project lead
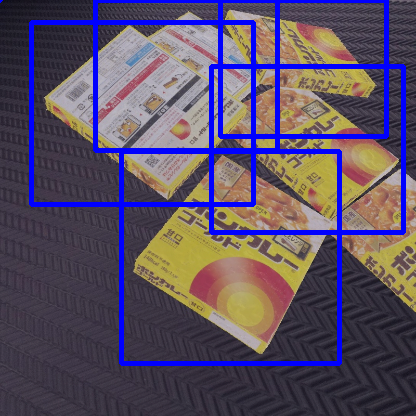
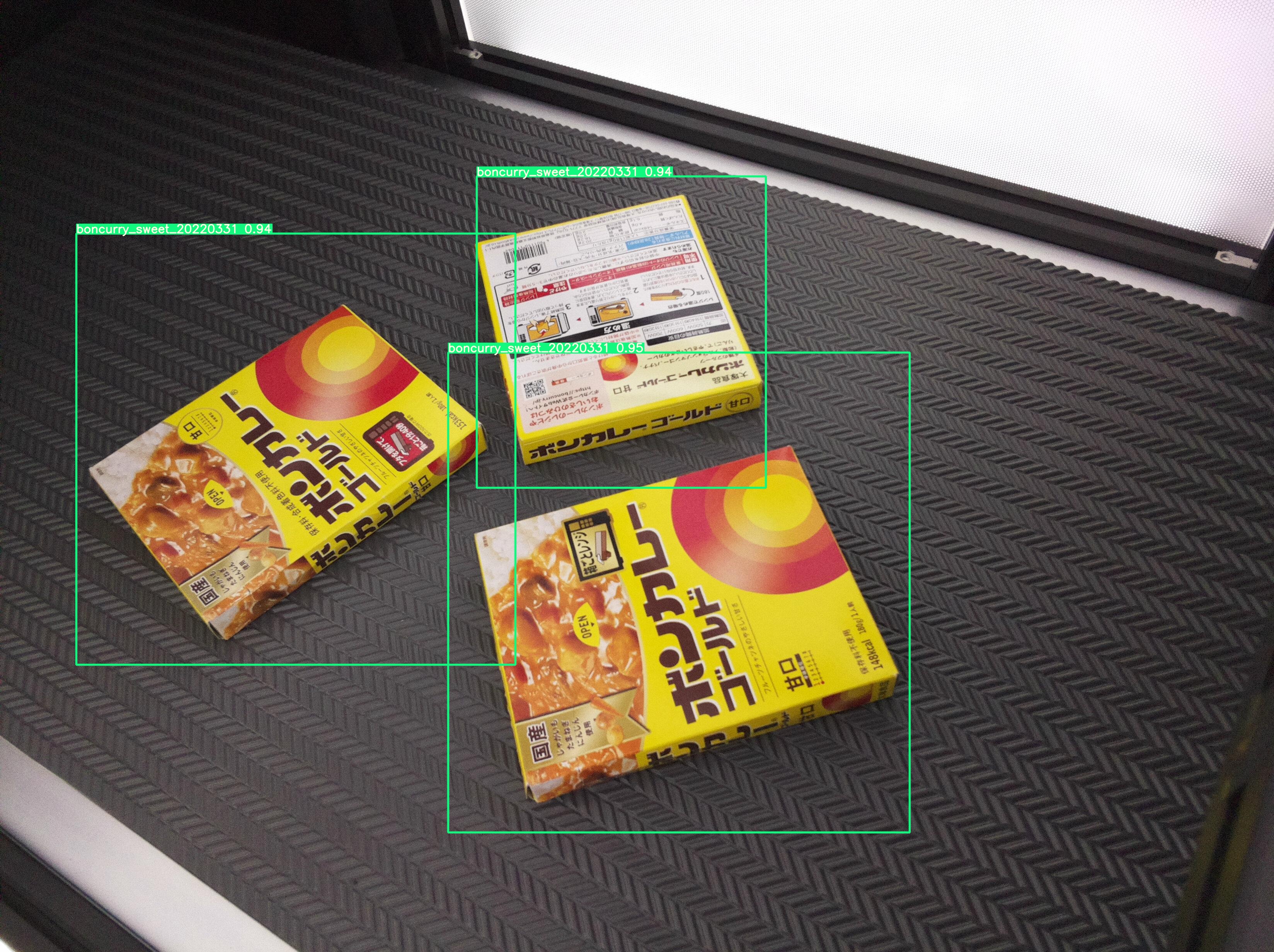
Object detection and classification with generated mesh data using Yolov4 enhancement.
- Modified Yolov4 model to learn from generated mesh data (Photo capture from 3D model of the object) and able to classification and localization real object.
- Changes model structure to increase accuracy from 81% to 99% while minimize computational cost.
株式会社DeepX
April 2021 – September 2021 (6 Months): Field Engineer (contract)
Automate transformation from camera position to robot position and AI model developer.
- Using QR code to estimate location of camera position (pixel) and interpolate to robot position (world coordination) with feedback state space matrix.
- Using model predictive control to control robot and learn in simulated environment and applied it to real-world robot.
- Coordinate effort from software and hardware team to create real world robot on operation site.
Koike & Yoshimura Laboratory, Tokyo Institute of Technology, Japan
August 2015 – September 2020 (5 years): Master & Ph.D student
September 2020 – March 2021 (6 Months): Researcher
Prosthetic hand robot with novel control system.
- The propose of this project was control angle and stiffness of finger and wrist in the same time.
- Developed Array EMG system to measure deep muscles in forearm. Successfully measure finger muscles which locate deep inside forearm and are relatively small compare to other muscles. Convert technology used in EEG system by place multiple number of monopole sensor on the forearm. First model is AMICA using EEGLAB with correlation coefficient to control each finger separately.
Human head pose direction estimation.
- Estimate human head direction using facial landmark and normalize 3D model. The facial landmark was estimated using machine learning on 256x256p then normalize model from ratio of middle eye, nose, mouth was calculated according to general anatomy. Finally head pose direction was estimated by match the 3D model with 15 points of facial landmark (4 eye, 3 nose, 2 cheek, 5 mouth, and 1 chin).
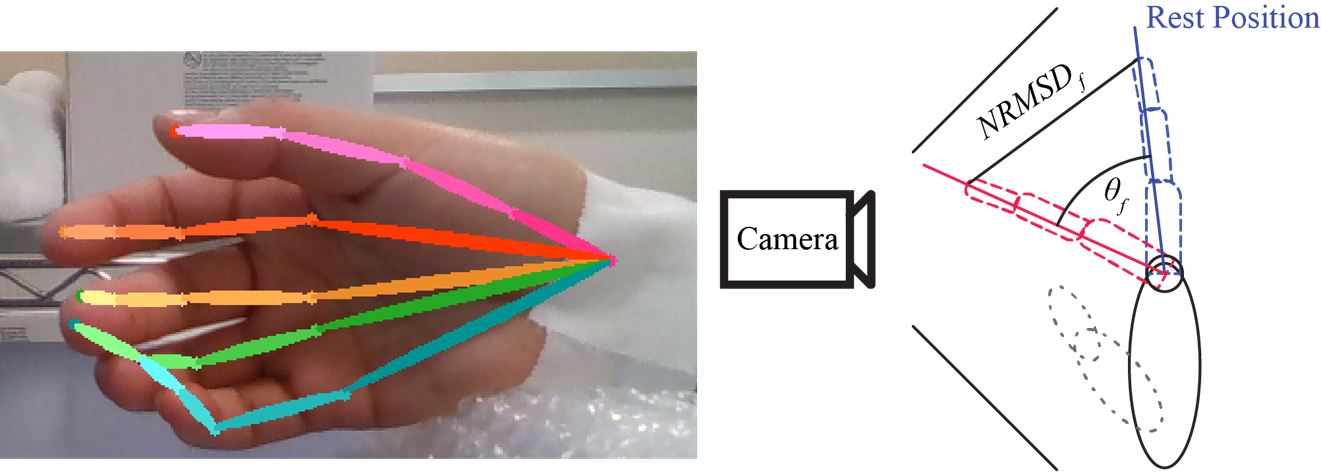
Finger motion capture.
- Produced new AI based motion capture using all RGB and deep data. The system able to track every single movement of finger separately using image data and convolutional-pose-machines. The result was test and verify using motion capture (Optitrack) with accuracy of 83%. Current platform is realsense camera with Tensorflow on python and output is compare with conventional system with accuracy of 82%.
convolutional-pose-machines-release
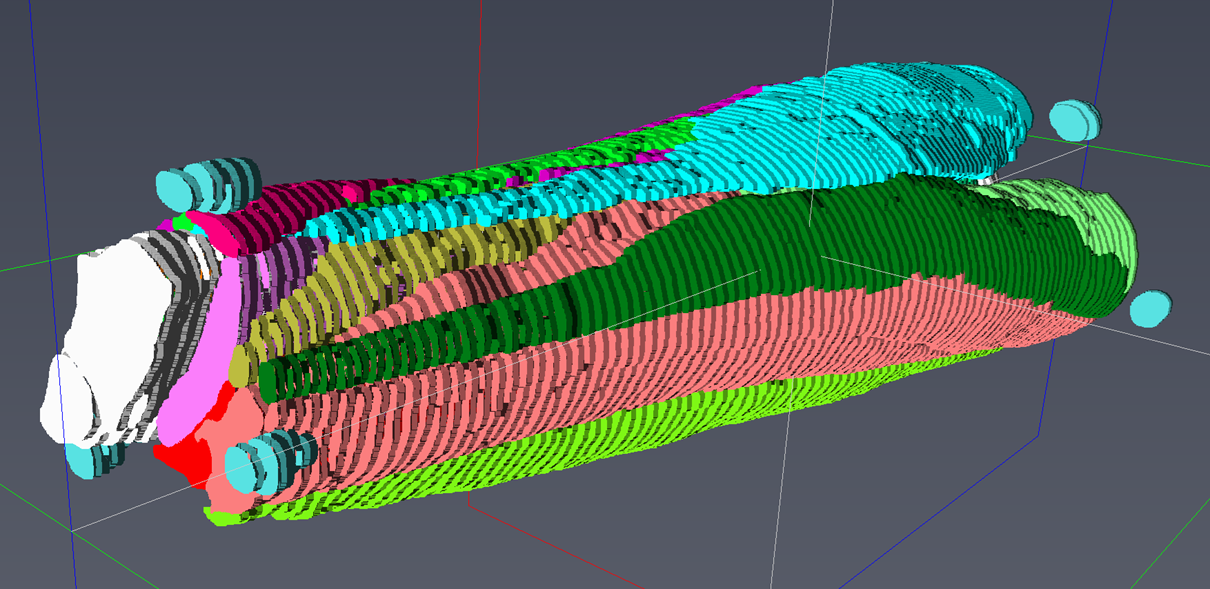
Skeleton muscle modeling from CT and MRI image.
- Create AI to automate instant segmentation of human muscles, bone, skin and fat of lower arm using simulated data.
Education
Doctor of Philosophy (Ph.D.) in Information and Communication Engineering
- September 2017 - August 2020
- Tokyo Institute of Technology, Japan
Master of Engineer (M.Eng.) in Information and Communication Engineering
- September 2015 - August 2017
- Tokyo Institute of Technology, Japan
Publications
-
Stapornchaisit S, Kim Y, Takagi A, Yoshimura N, Koike Y. “Finger Angle Estimation From Array EMG System Using Linear Regression Model With Independent Component Analysis”. Frontier Neurorobot. 2019;13:75. Published 2019 Sep 26. doi: https://doi.org/10.3389/fnbot.2019.00075
-
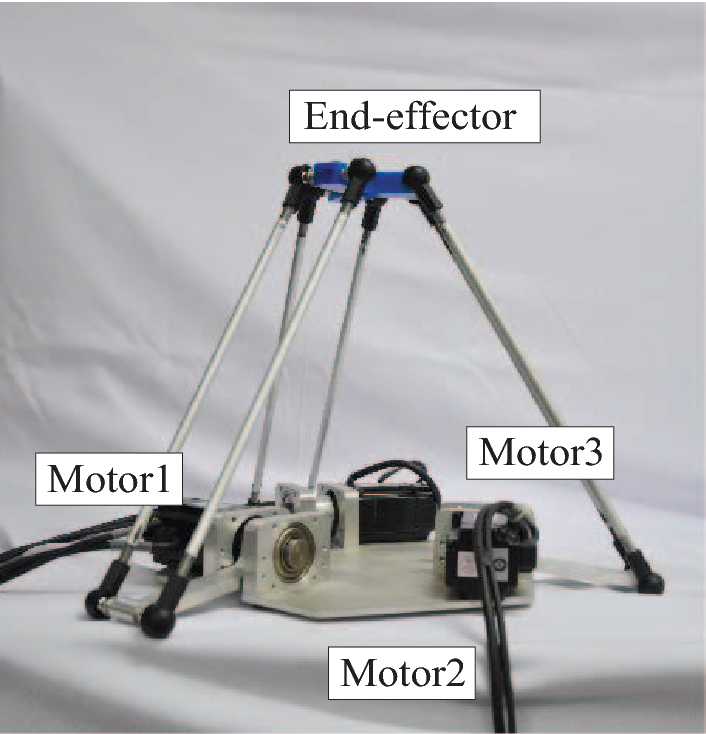
Stapornchaisit, Sorawit, et al. “Bilateral control in delta robot by using Jacobian matrix.” 2015 6th International Conference of Information and Communication Technology for Embedded Systems (IC- ICTES). IEEE, 2015.
-
Stapornchaisit, Sorawit, Sidshchadhaa Aumted, and Hiroshi Takami. “Disturbance Rejection for Boost
Converter via Adaptive Inverse LQ Servo-Control.” International Journal of Future Computer and Communication 3.1 (2014): 50. -
Stapornchaisit, Sorawit, et al. “Micro-macro bilateral in task space for delta robot by using forward and inverse kinematic.” TENCON 2014-2014 IEEE Region 10 Conference. IEEE, 2014.
-
Stapornchaisit, Sorawit, Sidshchadhaa Aumted, and Hiroshi Takami. “A Novel Adaptive Voltage Control Strategy for Boost Converter via Inverse LQ Servo-Control.” International Journal of Electrical and Computer Engineering 6.12 (2012): 1704-1710.